贺强 搬运机器人在印刷中的应用研究 2018年 指导教师:陈一军
本文设计是基于Autolabor小车为基础,以Arduino六自由度机械臂控制为主要对象,对其系统的硬件进行设计和研究,并以此基础上,采用合适的控制系统方法,进行了软件系统的设计。在保证系统的可靠性和稳定性的情况下,通过编写控制程序来完成对各个部件的控制。本次设计也表明基于Arduino控制板能够完美的契合对中小型机器人的控制要求,无论实在灵活性还是控制精度上都可以表现出良好的性能,但仍有一些不足需要改进。
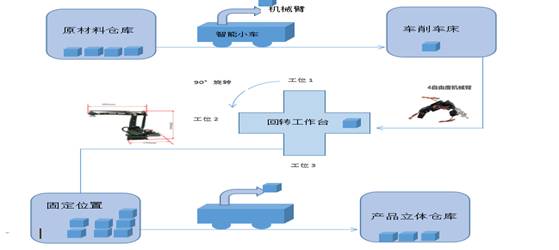
图1 智能制造系统规划图

图2 搬运机器人的整体设计


图3 机械臂调试

图4 模拟智能制造工作台